4-legged robots can pull off plenty of complicated duties, however there’s a purpose you don’t usually see them navigating “busy” environments like forests or vine-laden overgrowth. Regardless of all their skills, most on-board AI methods stay fairly unhealthy at responding to all these bodily variables in real-time. It would really feel like second nature to us, nevertheless it solely takes the slightest misstep in such conditions to ship a quadrupedal robotic tumbling.
After subjecting their very own canine bot to a barrage of impediment course runs, nonetheless, a crew at Carnegie Mellon College’s Faculty of Engineering is now providing a strong step ahead, so to talk, for robots deployed within the wild. In line with researchers, educating a quadrupedal robotic to reactively retract its legs whereas strolling offers one of the best gait for each navigating and untangling out of obstacles in its means.
[Related: How researchers trained a budget robot dog to do tricks.]
“Actual-world obstacles is perhaps stiff like a rock or delicate like a vine, and we wish robots to have methods that forestall tripping on both,” Justin Yim, a College of Illinois Urbana-Champaign engineering professor and mission collaborator, mentioned in CMU’s recent highlight.
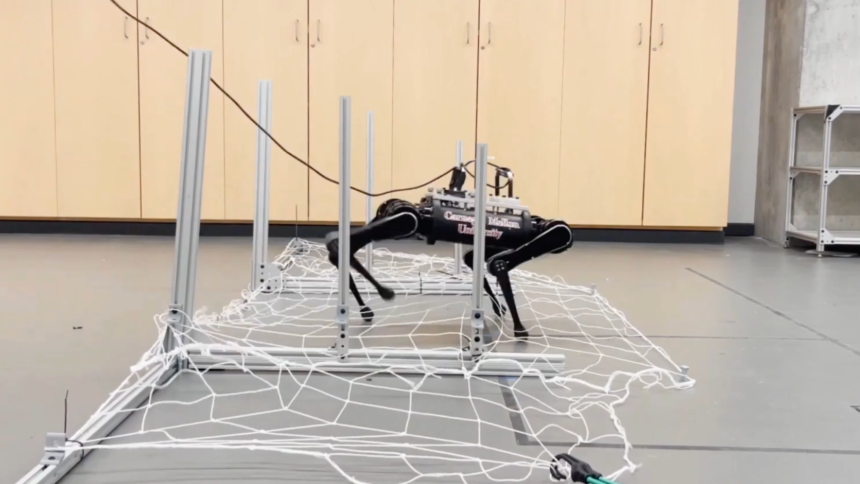
The engineers in contrast a number of stride methods on a quadrupedal robotic whereas it tried to stroll throughout a brief distance interrupted by a number of, low-hanging ropes. The robotic rapidly entangled itself whereas high-stepping, or strolling with its knees angled ahead, however retracting its limbs instantly after detecting an impediment allowed it to easily cross the stretch of flooring.
“Once you take robots outdoor, the complete downside of interacting with the surroundings turns into exponentially harder as a result of it’s a must to be extra deliberate in every thing that you simply do,” David Ologan, a mechanical engineering grasp’s scholar, instructed CMU. “Your system needs to be strong sufficient to deal with any unexpected circumstances or obstructions that you simply would possibly encounter. It’s fascinating to sort out that downside that hasn’t essentially been solved but.”
[Related: This robot dog learned a new trick—balancing like a cat.]
Though wheeled robots should still show extra suited to city environments, the place the bottom is mostly flatter and infrastructures equivalent to ramps are extra frequent, strolling bots might hypothetically show way more helpful in out of doors settings. Researchers consider integrating their reactive retraction response into current AI navigation methods might assist robots throughout out of doors search-and-rescue missions. The newly designed daintiness may also assist quadrupedal robots conduct environmental surveying with out damaging their environment.
“The potential for legged robots in out of doors, vegetation-based environments is fascinating to see,” mentioned Ologan. “In the event you reside in a metropolis, a wheeled platform might be a greater possibility… There’s a trade-off between with the ability to do extra complicated actions and being environment friendly together with your actions.”







